

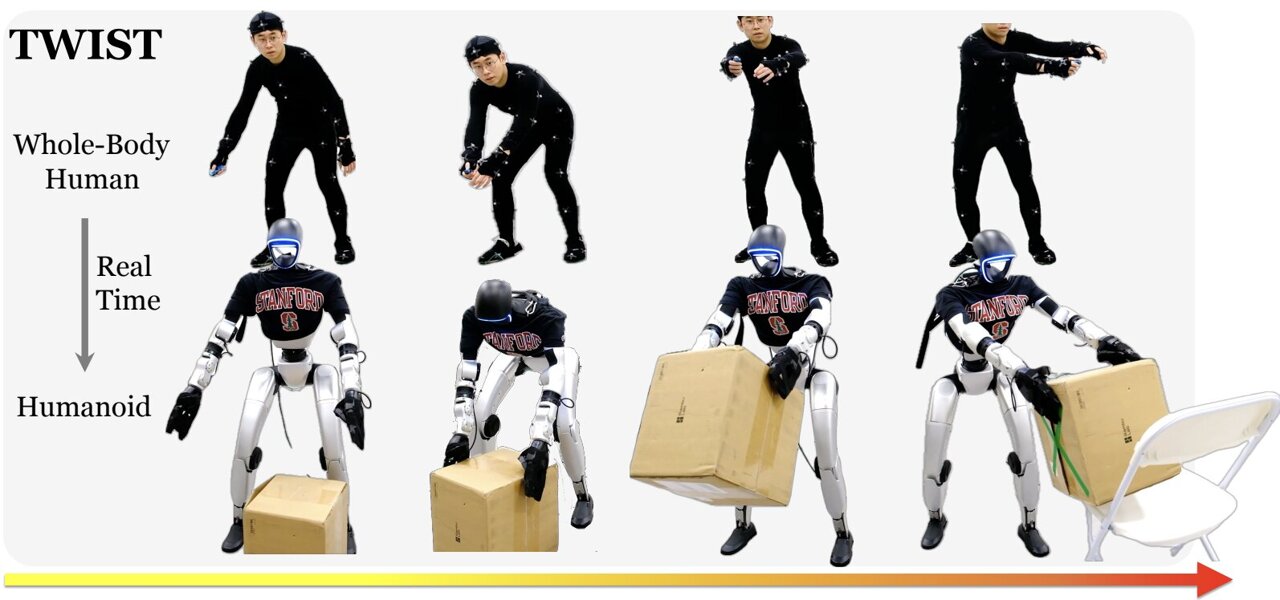
O recente avanço no campo da robótica humanoide, especialmente através do sistema TWIST, marca um significativo passo em direção à replicação da destreza humana em máquinas. Desenvolvido em conjunto por pesquisadores das universidades de Stanford e Simon Fraser, o sistema TWIST utiliza a teleoperação em tempo real para permitir que robôs humanoides executem tarefas com coordenação e habilidade semelhantes às de um ser humano. Este feito é possível graças à integração entre dados de captura de movimento, aprendizado por reforço e aprendizado por imitação, que capacitam os robôs a simular movimentos corporais humanos completos enquanto realizam atividades diárias complexas.
O Impacto Tecnológico e Econômico do TWIST
A introdução do TWIST é um divisor de águas para a indústria da robótica humanoide, abrindo caminho para aplicações que exigem uma interação mais natural e segura com o ambiente. Os desenvolvedores, usuários industriais e acadêmicos do setor de robótica estão entre os principais stakeholders que se beneficiarão da tecnologia que almeja reduzir os custos das tarefas perigosas e repetitivas. Além disso, a implementação de robôs em ambientes industriais e domésticos pode incrementar a produtividade e criar novos empregos nas áreas de manutenção e integração de sistemas.
Tecnologias e Metodologias por Trás do TWIST
O TWIST se baseia em tecnologias de ponta, como sistemas de captura de movimento (MoCap) e algoritmos avançados para controle de múltiplos graus de liberdade dos robôs humanoides. A teleoperação em tempo real, combinada com aprendizado por imitação, permite que os robôs observem e repliquem movimentos humanos com precisão. O uso de plataformas de software para integração dos dados cinemáticos humanos com sistemas de robótica é crucial para alcançar a flexibilidade e adaptação rápida requerida em ambientes dinâmicos.
Desafios e Oportunidades Futuras
A evolução do sistema TWIST enfrenta desafios significativos, como a dependência de hardware sofisticado e a regulamentação rigorosa relacionada à segurança e privacidade. No entanto, as oportunidades são igualmente promissoras, com potencial expansão para aplicações domésticas, assistência à saúde, e emergência. A inovação em áreas como sensores vestíveis e visualização computacional pode reduzir a necessidade de MoCap, promovendo a portabilidade e eficiência dos sistemas robóticos.
Comparação com Competidores no Mercado
Concorrentes como a 1X e a Figure AI estão desenvolvendo tecnologias similares, com foco em robôs humanoides para testes em ambientes domésticos até 2025. Empresas como a RealMan Robotics e a Amazon têm avançado em teleoperação e automação industrial, respectivamente. Cada player no mercado está contribuindo para um ecossistema mais robusto, sublinhando a relevância do TWIST e sua capacidade de integrar teleoperação com aprendizado por imitação em um modelo inovador.
Previsões e o Futuro da Robótica Humanoide
A previsão de crescimento para robôs humanoides entre 2025 e 2030 é acelerada, com uma crescente integração de inteligência artificial para alcançar maior autonomia. Esse movimento aponta para uma transformação iminente dos robôs humanoides, não apenas em setores industriais, mas também em residências e serviços de saúde, promovendo uma revolução na automação com implicações econômicas e sociais significativas.
Reflexão do Time do Blog da Engenharia
- O potencial da robótica humanoide desafia preconceitos tradicionais sobre automação e nos faz repensar o papel da tecnologia nas tarefas diárias.
- A exploração do TWIST destaca a importância da colaboração interdisciplinar para superar barreiras tecnológicas e avançar no campo da engenharia.
- Estudos contínuos e feedbacks práticos são essenciais para melhorar a integração e aceitação das soluções robóticas em ambientes reais, assegurando benefícios sustentáveis.
Via: https://techxplore.com/news/2025-05-body-teleoperation-robots-tasks-human.html