



O campo da robótica mais uma vez dá um passo à frente com um projeto inovador do Google DeepMind, que involve treinamento de um robô para jogar tênis de mesa. Utilizando uma combinação sofisticada de visão de alta velocidade, controle motor preciso e uma arquitetura de controle hierárquica de dois níveis, o projeto visa atingir um nível amador de jogo. Esta iniciativa não apenas demonstra a capacidade de aprendizado dos robôs em ambientes dinâmicos, mas também realça a habilidade de adaptação a diferentes estilos de jogo humano.
Desenvolvimento do Projeto pelo Google DeepMind
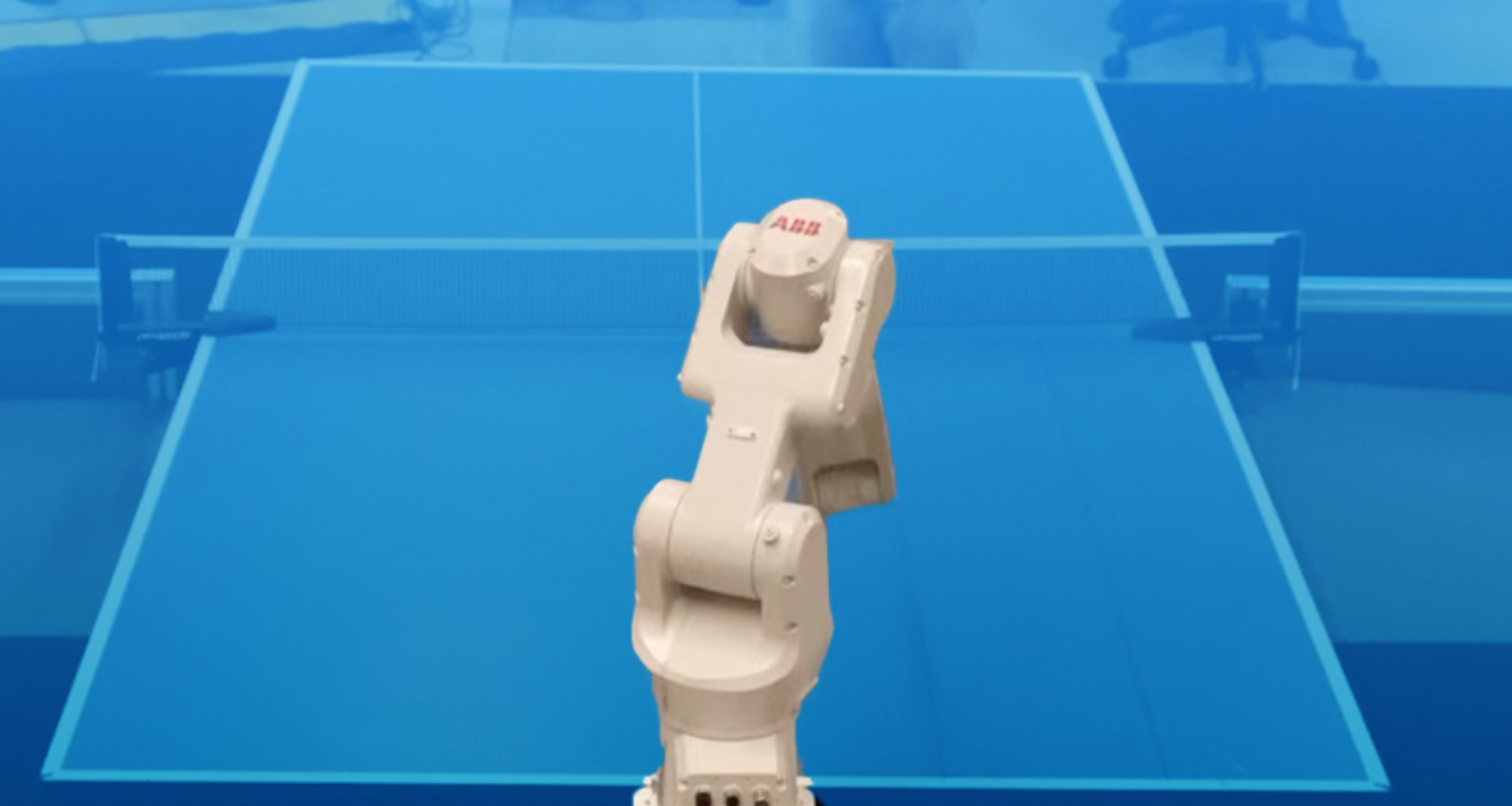
O Google DeepMind lidera este avanço tecnológico em robótica, focando no desenvolvimento de um robô que joga tênis de mesa em nível amador. O projeto utiliza a visão computacional, com câmeras que capturam a ação em 125 quadros por segundo, e um braço robótico ABB IRB 1100 montado em um sistema de pórticos lineares para cobrir a mesa. Esta configuração permite ao robô competir contra humanos de várias habilidades, garantindo vitórias contra iniciantes e, impressionantemente, 55% contra jogadores intermediários. Entretanto, o robô ainda enfrenta derrotas quando joga contra jogadores avançados. Este projeto não só mostra o potencial dos robôs para aprender autonomamente, mas também a capacidade de transferir esse aprendizado para situações físicas reais e diversificadas.
Tecnologias e Metodologias Utilizadas
A tecnologia por trás desse projeto inclui uma arquitetura hierárquica de controle, onde os controladores de baixo nível são responsáveis por habilidades motoras específicas, enquanto um controlador de alto nível toma decisões táticas para cada jogada. Esta arquitetura é auxiliada por redes neurais que realizam o rastreamento da bola, proporcionando uma interação rápida e precisa. O aprendizado por reforço desempenha um papel crucial, treinando o robô em partidas cooperativas e competitivas, tanto entre robôs quanto contra humanos. Este sistema contínuo de treinamento é essencial para a melhoria das habilidades do robô e para lidar com o esquecimento catastrófico, um desafio comum no aprendizado de máquinas.
Impacto no Campo da Engenharia e Robótica
O projeto do Google DeepMind sinaliza uma tendência crescente na automação de tarefas em ambientes dinâmicos e não totalmente estruturados, como uma mesa de tênis, demonstrando a viabilidade dos robôs em executar tarefas de alta frequência e baixa latência. Esta inovação pode alavancar novas aplicações em áreas como logística e manufatura flexível, onde a velocidade e precisão são fundamentais. Além disso, a integração posterior de modelos multimodais, como o Gemini, sugere novas possibilidades de interação robô-humano, onde o robô pode receber sugestões táticas em linguagem natural, aproximando-se mais da performance humana.
Considerações sobre Segurança e Normas
A implementação de robôs em atividades que envolvem interação próxima com humanos levanta questões de segurança. Embora o artigo não detalhe certificações específicas, normas como a ISO 10218 para robôs industriais e a ISO/TS 15066 para robôs colaborativos são relevantes. A conformidade com essas normas é essencial para garantir que a proximidade com humanos seja segura, minimizando riscos associados à interação direta durante tarefas como o tênis de mesa.
Desafios e Oportunidades Futuras
Desafios como a transferência de aprendizado para ambientes caóticos fora da mesa de tênis, a robustez em condições de baixa visibilidade e a manutenção de aprendizado contínuo são questões a serem superadas. No entanto, as oportunidades futuras são promissoras, como o uso de linguagens multimodais para feedback em tempo real e a descoberta automática de novas habilidades sem a necessidade de rótulos extensivos. Este avanço no robô jogador de tênis de mesa não só representa uma melhoria contínua em inteligência artificial, mas também abre portas para avanços em várias indústrias onde a automação representa um diferencial competitivo.
Reflexão do Time do Blog da Engenharia
- Robôs estão alcançando capacidade de aprendizado autônomo em ambientes dinâmicos.
- Integrações futuras com modelos multimodais podem transformar o campo da robótica.
- A segurança e conformidade com normas são cruciais para a implementação bem-sucedida.
Este avanço destaca o potencial dos robôs em perceber, planejar e executar tarefas desafiadoras, aproximando-nos de uma automação onde a interação humana e robótica é cada vez mais eficiente e segura.
Via: https://interestingengineering.com/videos/google-trains-robot-ai-with-table-tennis